
Ego Ghost Mode
This section describes about the Ego Ghost Mode.
ROS Protocol Messages
https://github.com/MORAI-Autonomous/MORAI-ROS_morai_msgs/blob/master/msg/GhostMessage.msg
Ghost Ctrl Cmd
Ghost Mode Ego Vehicle Control Command
Message Type : morai_msgs/GhostMessage
Default Topic : /ghost_ctrl_cmd
Type Description : Message for controlling the Ego-vehicle using Ghost Mode.
Ghost Mode : A mode which you can spawn the vehicle to the desired position.
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | position | m | Set the position of the Ego-vehicle (X, Y, Z) | |
2 | rotation | deg | Set the rotation of the Ego-vehicle (Roll, Pitch, Yaw) | |
3 | velocity | float64 | km/h | Velocity of the Ego-vehicle |
4 | steering_angle | float64 | deg | Ego-vehicle’s steering angle |
How to use Ego Ghost Mode in ROS
Go to Edit > Network Settings and select the MoraiGhostCmdController in the Cmd Control.
Enter the IP for your environment and click Connect.
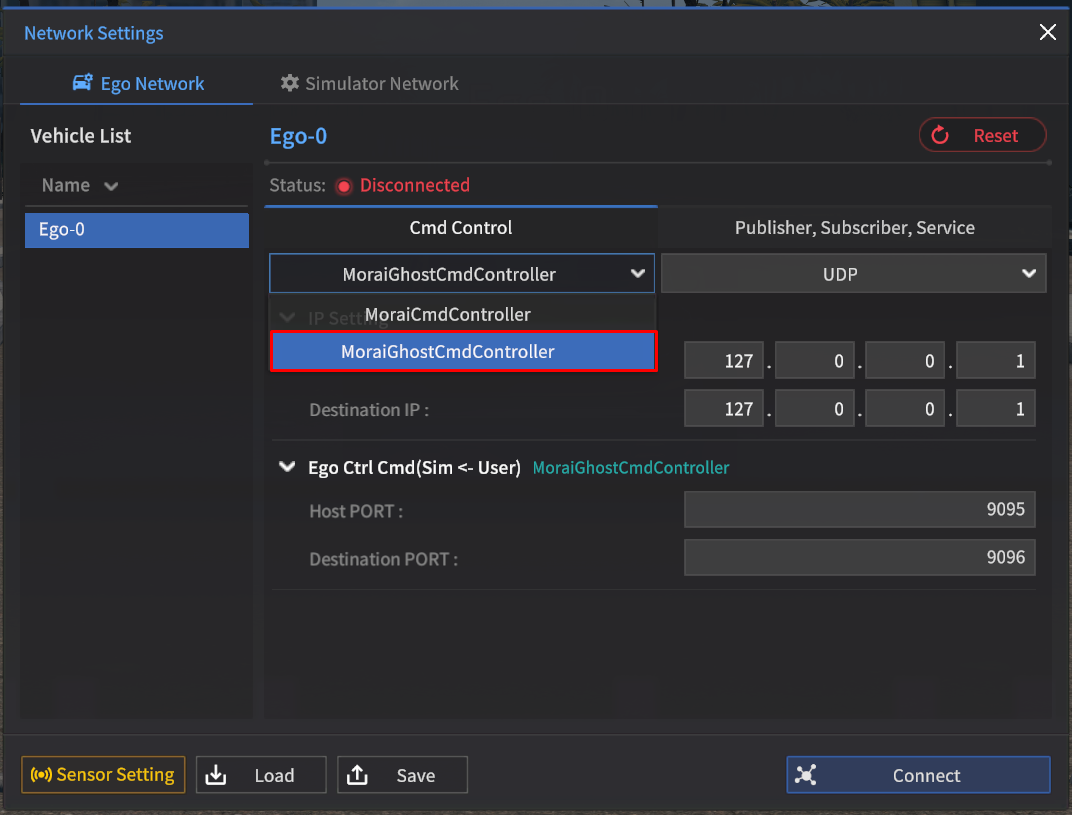
Network Settings
Publish /ghost_ctrl_cmd _Topic in ROS.
The Terminal window after Publish completes
Press
Qkey to view the Ego Ghost Vehicle spawned based on the information you published.
Ego-vehicle after pressing Q key
UDP Protocol Messages
Ghost Ctrl Cmd
Type Description : Message for controlling the Ego-vehicle using Ghost Mode.
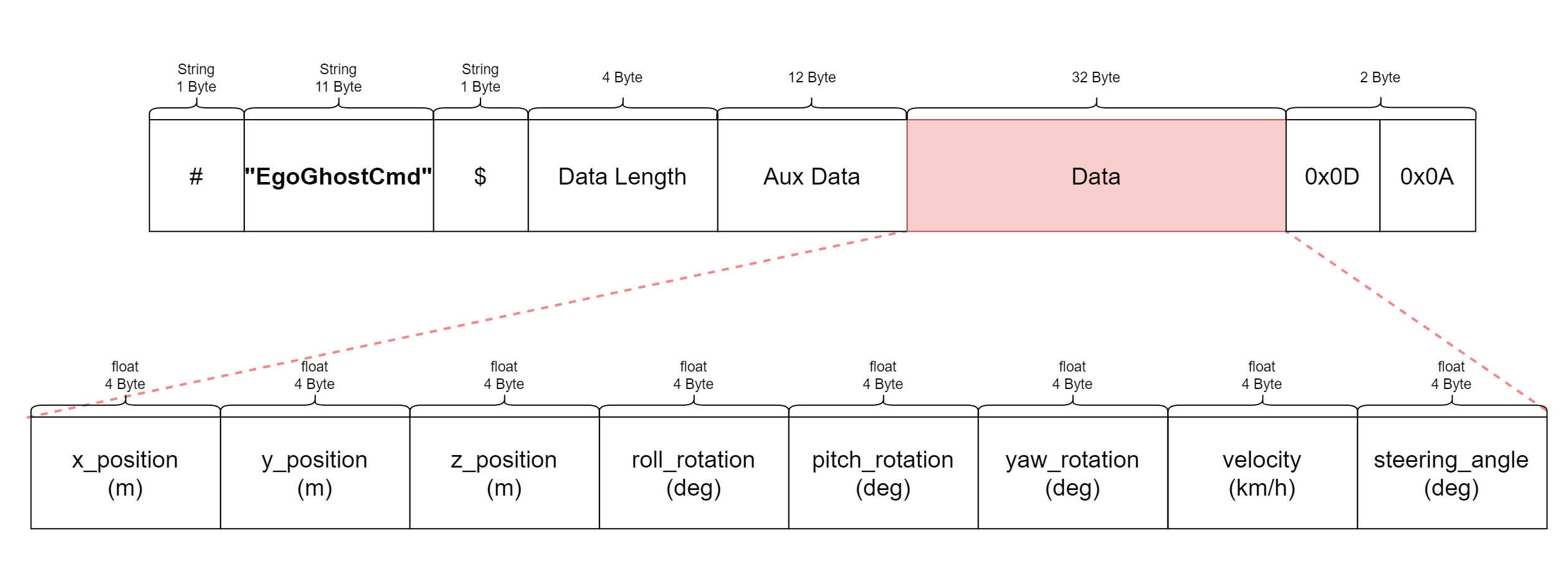
Communication Protocol
Total Packet Size: 63 Bytes
Data Size: 32 Bytes
x_position (4byte / float)
Set the X position of the Ego-vehicle (m)
y_position (4byte / float)
Set the Y position of the Ego-vehicleego (m)
z_position (4byte / float)
Set the Z position of the Ego-vehicle (m)
roll_rotation (4byte / float)
Set Roll rotation of the Ego-vehicle (deg)
pitch_rotation (4byte / float)
Set Pitch rotation of the Ego-vehicle (deg)
yaw_rotation (4byte / float)
Set Yaw rotation of the Ego-vehicle (deg)
velocity (4byte / float)
Velocity of the Ego-vehicle (Km/h)
steering_angle (4byte / float)
Steering Angle of the Ego-vehicle (deg)
How to use Ego Ghost Mode in UDP
The following GitHub link is provided to enable the Ego Ghost Mode feature on UDP.
: [UDP] GitHub link for Ego Ghost Mode
You can enable this feature by running python EGO_Ghost_Mode.py.